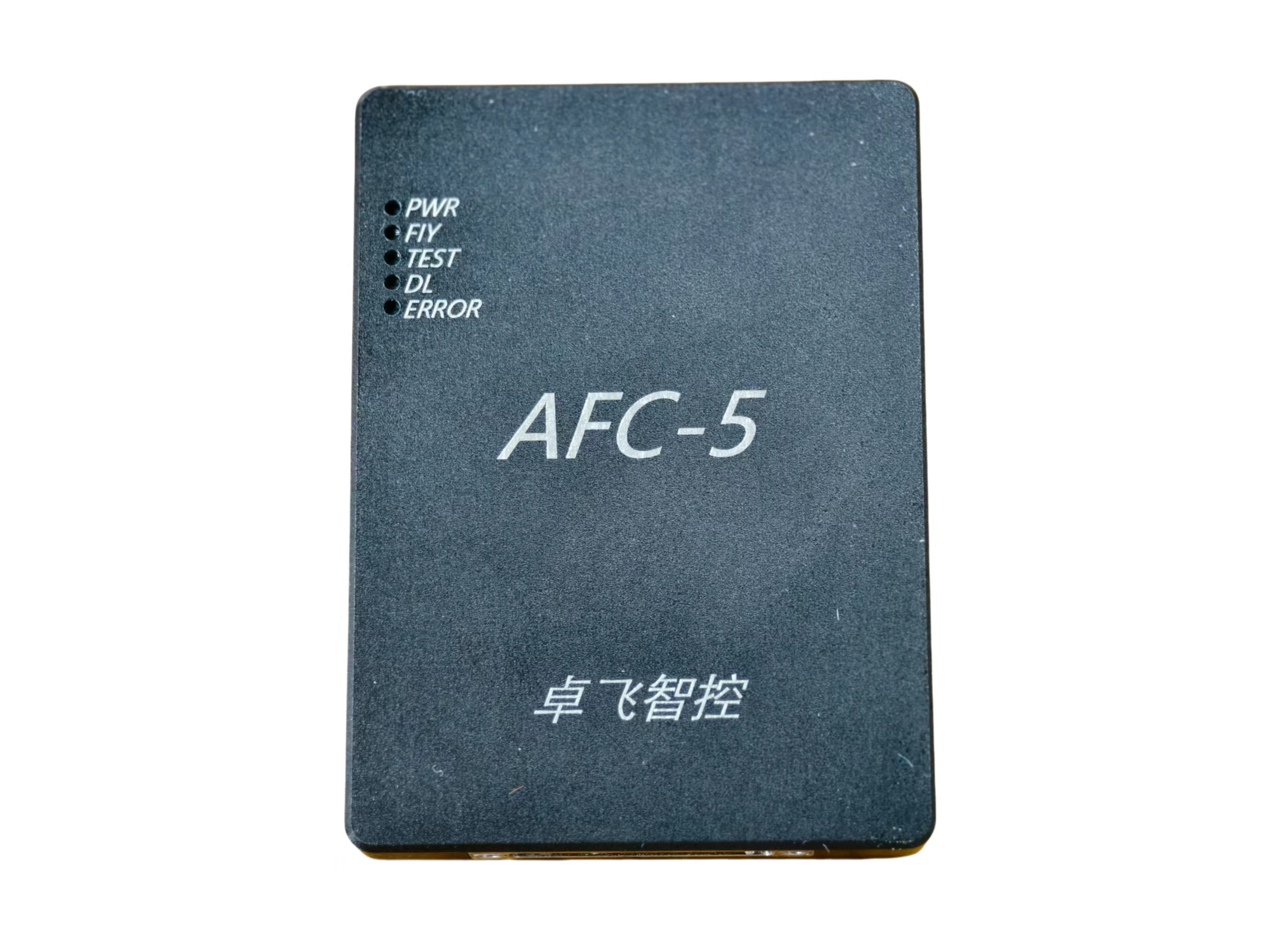
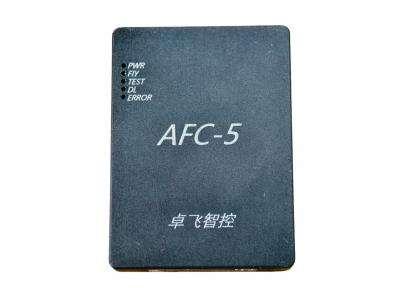
AFC-5飞控
采用基于模型设计的代码生成技术,基于 MATLAB/Simulink模型的图形化设计及代码自动生成技术。
具备数据存储功能和模块化接口库。采用MicroSD存储卡并配备模块化的Simulink模型接口库。
通过设计通用通讯接口,可支持2种及以上类型无人机,如固定翼或旋翼等,同时能够适配主流智能计算平台如NVIDIA Jetson Xavier NX或华为Atlas 200等。
具备基础控制算法模块,支持二次开发。
具备基础多源信息融合导航算法模块,所融合传感器需包括陀螺仪、加速度计、磁力计、GPS、气压计等,支持二次开发。
具备程序下载串行接口插座,支持串口更新系统程序。
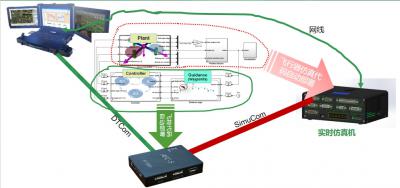
提供飞控系统硬件在环的Simulink半实物仿真测试环境
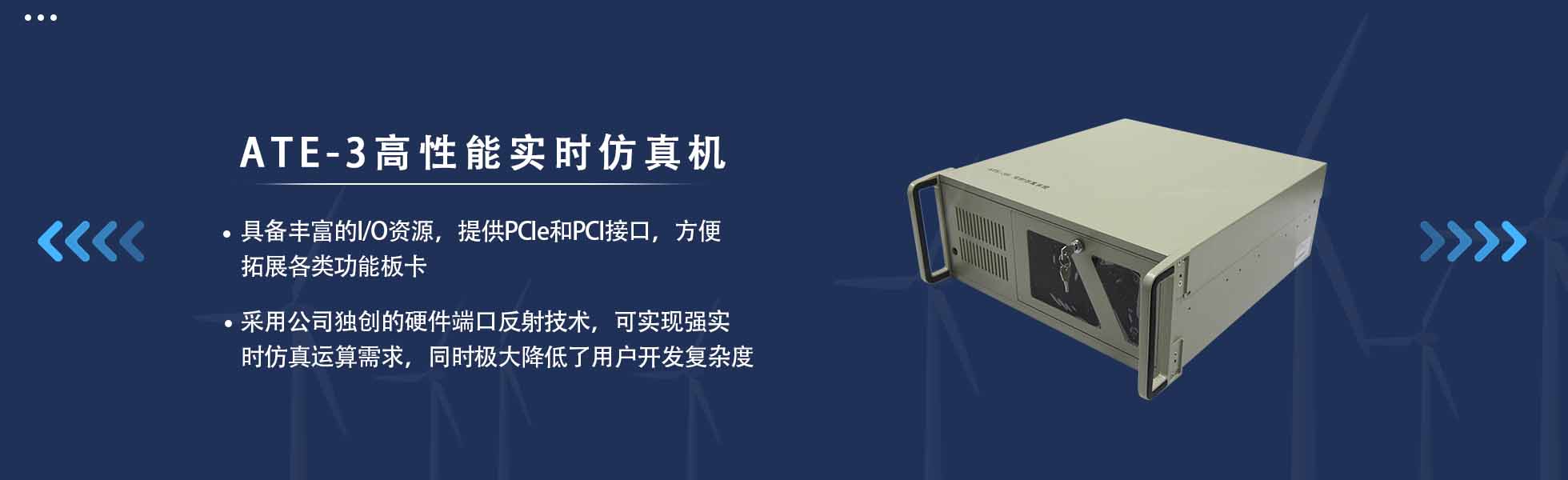
ATE-3便携式仿测仪
支撑平台实时仿真运算、数据采集处理、试验结果记录与指标评估
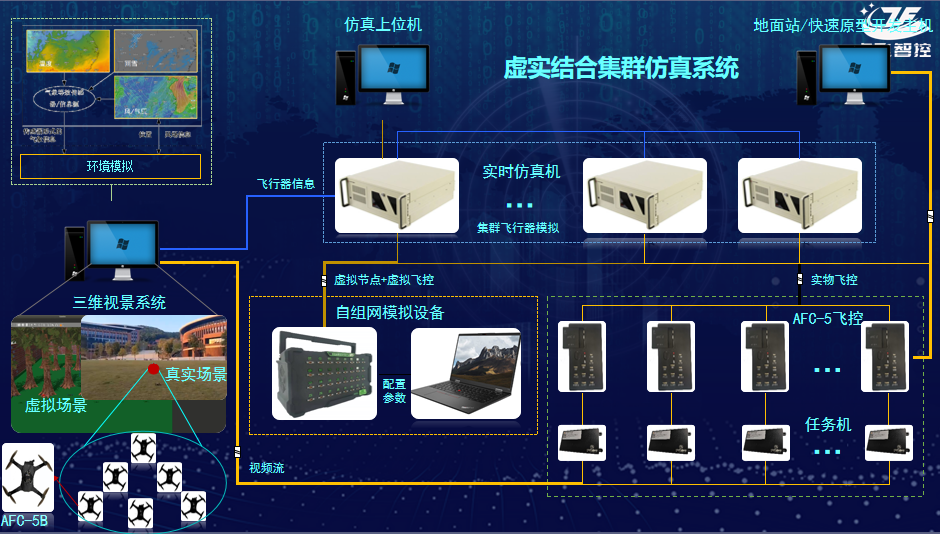
虚实结合无人集群
以“集群运动虚实结合混合驱动+虚拟场景感知驱动”作为系统设计的总体思想,即在模拟大规模无人集群运动过程中,小部分无人平台由实物无人平台运动驱动,而感知信息则由虚拟场景生成。既能支持虚实结合试验,同时也支持纯虚拟仿真试验。
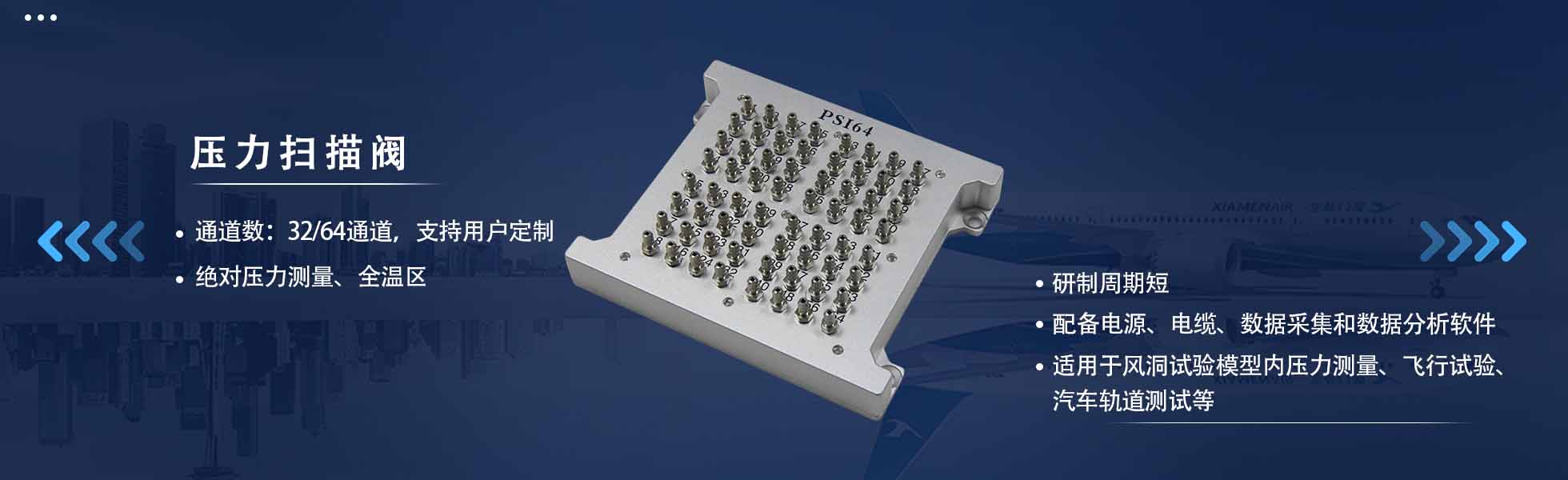
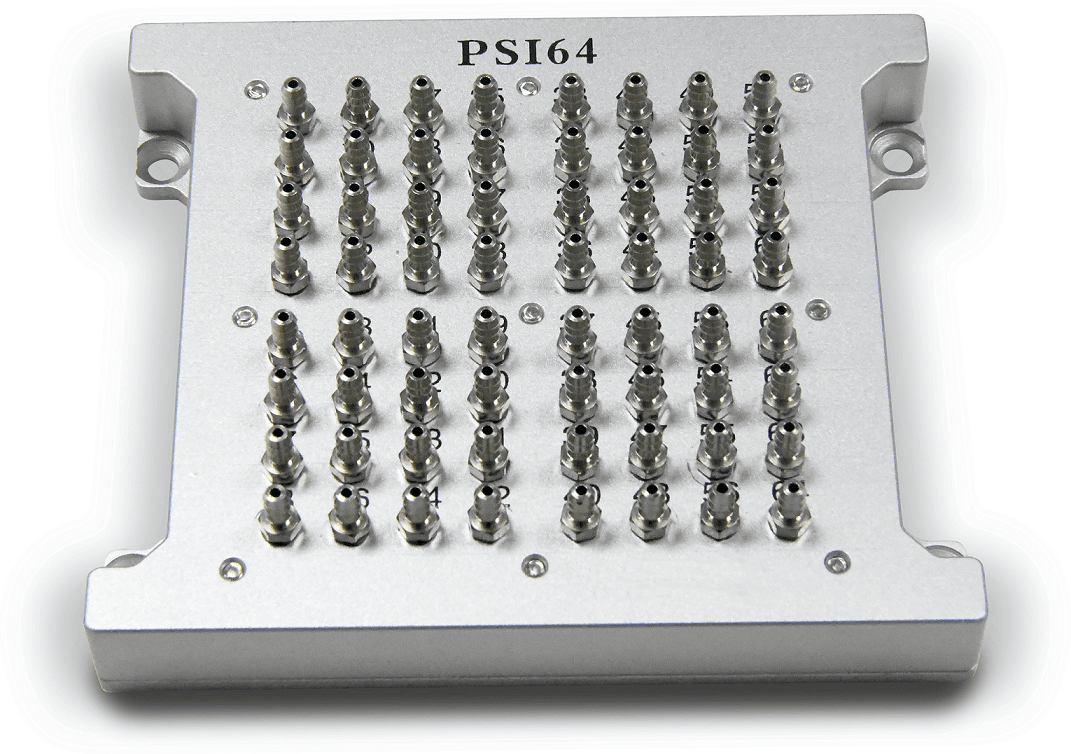
压力扫描阀
通道数:32/64通道,支持用户定制
绝对压力测量、全温区
研制周期短















 卓飞智控
卓飞智控
